Une équipe d’ingénieurs de l’université Caltech a dévoilé un véritable robot caméléon, dont l’extrême polyvalence pourrait être exploitée dans de nombreux domaines.
Morphobot
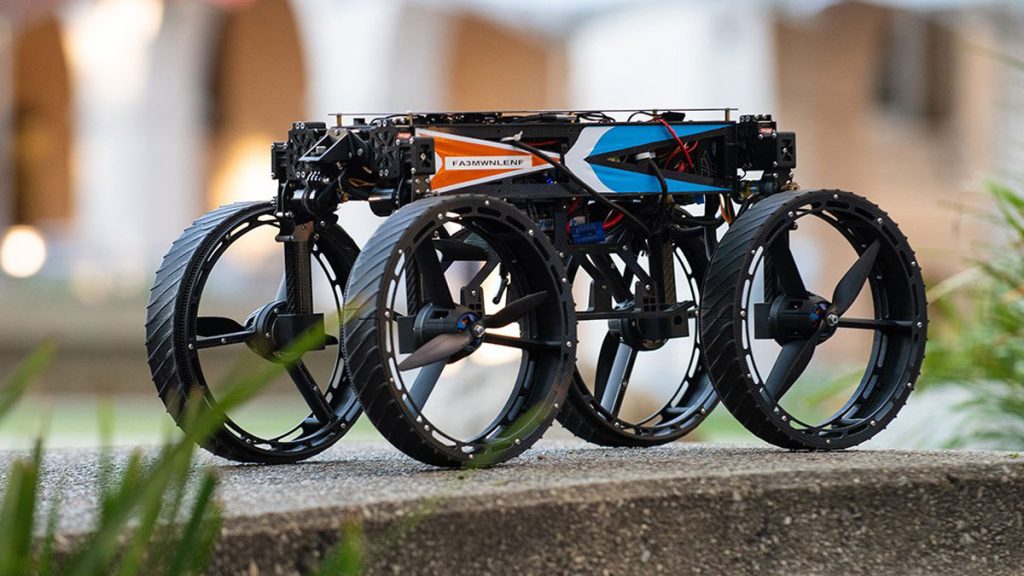
Présenté dans la revue Nature Communications, le « Multi-Modal Mobility Morphobot » (M4) ressemble à une banale voiture télécommandée dans sa configuration de base. Si celle-ci lui permet de se déplacer efficacement, il peut également faire pivoter ses quatres roues sur leur axe et actionner leurs rotors pour décoller à la manière d’un quadcoptère.
Ces deux types de déplacement seraient à eux seuls très utiles, mais le robot M4 a plus d’un tour dans son sac. En mode quatre roues, il peut bloquer leur rotation et les déplacer par paires, dans une sorte de mouvement de marche quadrupède, et également abaisser son châssis pour « s’accroupir ».
L’aidant à gravir des terrains abrupts ou des escaliers, la configuration deux roues/deux rotors lui permet également de se dresser pour sonder son environnement et planifier ses prochains mouvements, grâce à l’apport de l’IA.
L’idée derrière M4 était de proposer une machine entièrement autonome, capable de s’adapter en temps réel à son environnement. Roulant par défaut sur quatre roues (son mode le moins énergivore), la machine peut se transformer quasi instantanément en drone pour franchir un précipice ou un obstacle, puis revenir à sa configuration initiale ou en adopter une autre à la volée, pour venir à bout de passages étroits.
Repousser les limites de la locomotion robotique
Cet éventail de capacités pourrait aider des robots comme M4 à naviguer au sein d’environnements complexes, notamment pour rechercher des survivants dans des bâtiments effondrés, voire explorer d’autres planètes.
« Notre objectif était de repousser les limites de la locomotion robotique en concevant un système qui présente des capacités de mobilité extraordinaires avec une large gamme de modes de déplacement distincts », résume Alireza Ramezani, de Caltech. « Le projet M4 a atteint ces objectifs avec succès. »