
Des chercheurs de l’université Caltech ont dévoilé les dernières prouesses de leur robot bipède. D’une agilité stupéfiante, l’engin pourrait notamment être utilisé pour la maintenance et la surveillance des infrastructures difficiles d’accès.
« Nous nous sommes inspirés de la nature »
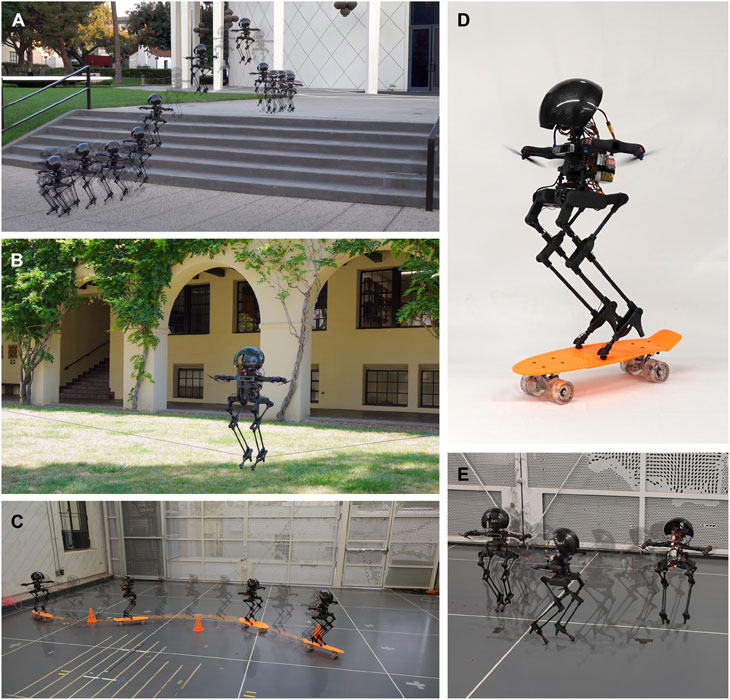
Mesurant environ 80 centimètres de haut, LEONARDO marche grâce à de petites jambes articulées comme le ferait « un poulet portant des talons hauts ». Il doit son équilibre exceptionnel à quatre hélices semblables à celles d’un drone placées au niveau de ses épaules, qui l’aident à corriger sa posture et lui permettent également de s’envoler pour franchir des terrains accidentés, des escaliers ou d’autres obstacles.
« Nous nous sommes inspirés de la nature », explique Soon-Jo Chung, auteur principal de l’article présentant LEO, paru dans la revue Science Robotics. « Pensez à la façon dont les oiseaux sont capables de battre des ailes et de se poser sur les lignes téléphoniques. Un comportement complexe mais intrigant se produit lorsque les oiseaux passent de la marche au vol. Nous voulions le comprendre et en tirer des enseignements. »
Ces modes de déplacement mixtes rendent LEO bien plus efficace que la plupart de ses homologues. Ses propulseurs lui confèrent un meilleur équilibre que celui d’un robot bipède, tandis que les jambes soulagent les propulseurs en supportant la majeure partie de son poids.
Une agilité hors du commun
Un long chemin a été parcouru depuis la présentation initiale du robot il y a deux ans. Passé des tests en laboratoire à la marche et au vol à l’extérieur, celui-ci a appris récemment deux nouvelles compétences démontrant son agilité hors du commun : il peut marcher sur une corde (slackline) sans tomber et slalomer entre des cônes en skateboard. Deux tâches que beaucoup d’humains auraient du mal à accomplir, sans parler des autres robots.
L’équipe affirme que LEO ne fera que gagner en agilité. Les futures versions seront dotées de jambes plus rigides, de propulseurs plus puissants et d’algorithmes plus intelligents pour l’aider à naviguer, marcher, voler et atterrir encore plus efficacement.
Par Yann Contegat, le
Source: New Atlas
Étiquettes: robot, caltech, leonardo
Catégories: Actualités, Robots & IA