Lorsque les fourmis font face à un gouffre ou un obstacle trop important pour pouvoir être franchi individuellement, elles peuvent unir leurs forces. Une telle capacité a récemment pu être reproduite chez de petits robots à quatre pattes.
Des dispositifs imprimés en 3D
Les robots quadrupèdes présentent des avantages incontestables par rapport à leurs homologues pourvus de roues. Ceux-ci pouvant notamment franchir des obstacles et traverser des terrains accidentés, on peut donc aisément imaginer l’utilisation d’essaims collaboratifs de robots dans des applications telles que la recherche de survivants sur les sites de catastrophes.
Cependant, même les dispositifs à pattes peuvent se retrouver bloqués par des gouffres profonds ou des obstacles trop raides pour être franchis. Partant de ce constat, Yasemin Ozkan-Aydin et ses collègues de l’université de Notre-Dame ont créé un ensemble de robots à quatre pattes imprimés en 3D pouvant travailler de concert afin de surmonter ces difficultés.
Récemment décrits dans la revue Science Robotics, ceux-ci mesurent 15 à 20 cm de long et intègrent une batterie au lithium-polymère, un microprocesseur, un capteur de lumière frontal, ainsi que des capteurs tactiles magnétiques à l’avant et à l’arrière.
L’union fait la force
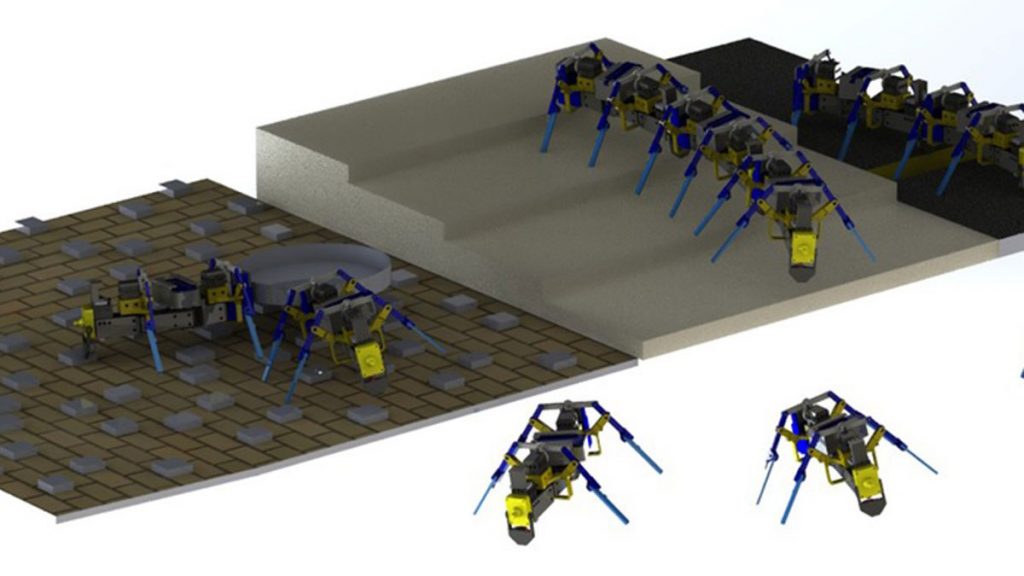
Lorsque l’un des engins fait face à un obstacle qu’il ne peut surmonter seul, il envoie un signal sans fil aux autres robots situés à proximité. Une fois sur place, ceux-ci utilisent leurs capteurs tactiles magnétiques pour déterminer leur orientation les uns par rapport aux autres et forment une chaîne.
De cette façon, ils peuvent former un pont pour franchir un gouffre ou des obstacles physiques, et même transporter des objets trop grands ou trop lourds pour un seul robot.
Ozkan-Aydin travaille actuellement à l’amélioration de la sensibilité, des capacités de collaboration et de l’autonomie de ce système robotique en essaim. Outre son utilisation dans les opérations de recherche et de sauvetage, ce système pourrait également trouver des applications dans des domaines tels que l’exploration spatiale, la surveillance de l’environnement ou l’étude de la dynamique collective chez les insectes.
Par Yann Contegat, le
Source: New Atlas
Étiquettes: fourmi, robot, impression 3D
Catégories: Actualités, Robots & IA