Les chercheurs ont conçu une main robotisée qui fonctionne grâce à l’extension de nos tendons. Elle aurait quasiment la même dextérité qu’une main humaine et permettrait de remplacer les prothèses actuelles. Une belle avancée pour le quotidien de demain.
Recréer les fonctionnalités d’une main humaine relève du défi. En effet, en raison de la complexité inhérente à une vraie main humaine, la main robotisée qui pourrait la remplacer, devra être très sophistiquée. La main anthropomorphique biomimétique implique inévitablement beaucoup de compromis pour qu’elle fonctionne correctement, tout en maintenant un facteur de forme humaine avec ses quatre doigts et son pouce qui devront être conçus pour imiter étroitement la main humaine, sur la théorie que les mains humaines ont été intelligemment conçues après des millions d’années d’évolution.
Zhe Xu a créé la main robot la plus détaillée et cinématiquement précise que nous n’ayons jamais vue, avec Emanuel Todorov, professeur agrégé de l’informatique et de l’ingénierie à l’université de Washington.
Les chercheurs ont scanné une main humaine à travers un scanner laser pour l’étudier parfaitement afin de la reproduire dans le but ultime de remplacer complètement la main humaine. Ils ont alors imprimé en 3D des os artificiels correspondants, ce qui leur a permis de reproduire les axes des articulations non fixées.
Zhe Xu, ce chercheur post-doctorant de Yale a donc co-dirigé la création de cette fameuse main robot. « Nous sommes très optimistes sur ce concept et nous sommes impatients de concrétiser ce projet le plus tôt possible », dit-il.
Le projet attire beaucoup d’attention même s’il n’est pas encore au point à 100 %. Il s’agirait alors d’une grande avancée dans la recherche grâce à la rencontre du biologique et de la robotique. Le concept est simple, il permettrait de créer une main robot qui prolongerait l’extension de nos tendons afin d’être commandée par notre cerveau comme une main naturelle.
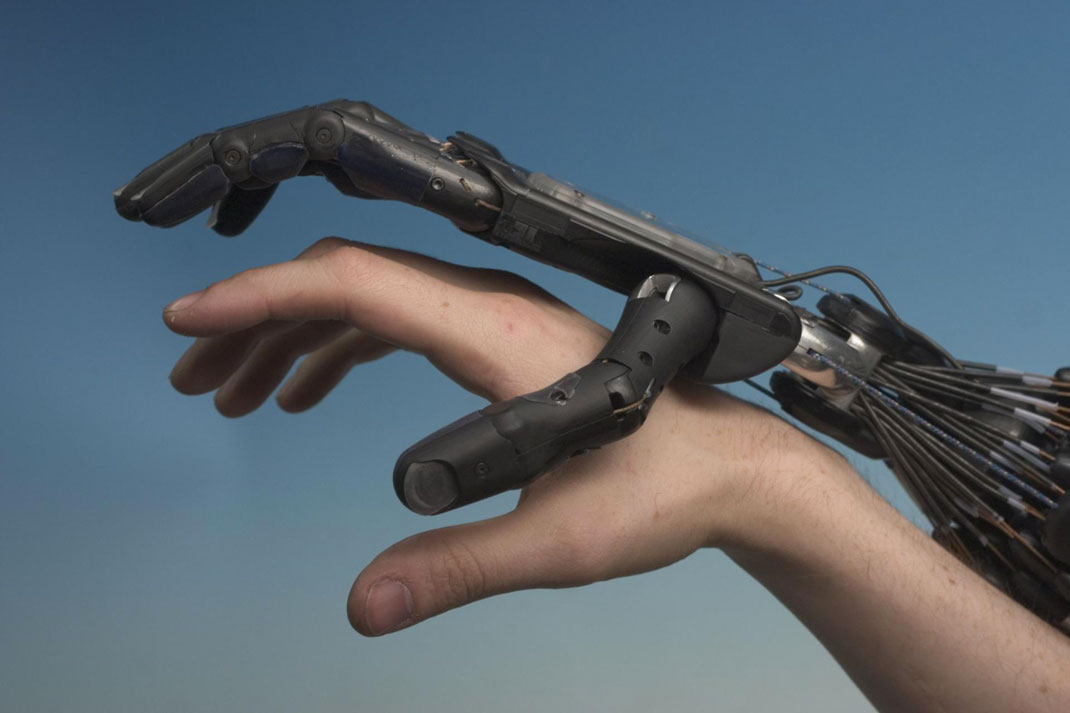
 Sur la main robot, les ligaments des articulations sont créés en cordage ultra résistant appelé Spectra avec des feuilles de caoutchouc qui ont été coupées avec un laser précis qui travaille sur du matériel mou. De même, les chercheurs ont conçu une dizaine de moteurs à la base de la main, ainsi qu’un réseau de câblage similaire aux canaux carpiens d’une main réelle. Cette main robot servira, selon les chercheurs, à travailler à l’amélioration des prothèses déjà existantes.
Sur la main robot, les ligaments des articulations sont créés en cordage ultra résistant appelé Spectra avec des feuilles de caoutchouc qui ont été coupées avec un laser précis qui travaille sur du matériel mou. De même, les chercheurs ont conçu une dizaine de moteurs à la base de la main, ainsi qu’un réseau de câblage similaire aux canaux carpiens d’une main réelle. Cette main robot servira, selon les chercheurs, à travailler à l’amélioration des prothèses déjà existantes.
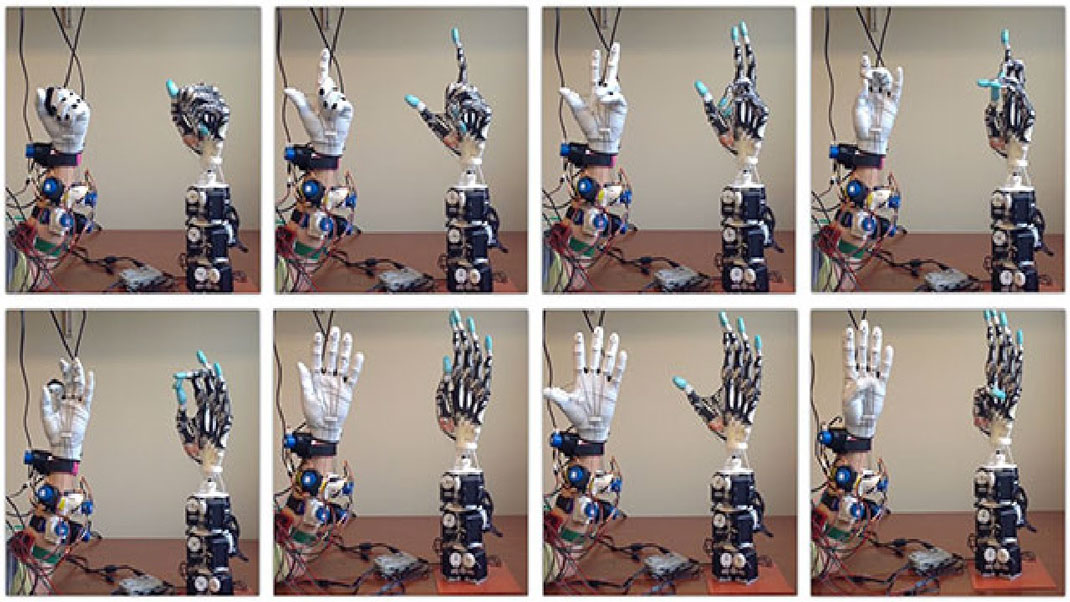
La dextérité de la main robot est impressionnante. Elle peut saisir des objets assez fins comme un CD par exemple ou bien plus gros comme des rouleaux de ruban. Celle-ci peut également être commandée à distance par le port d’un gant recouvert de capteurs.
La main robot pourrait donc remplacer la main humaine perdue dans un accident par exemple, mais elle pourrait également être utilisée pour aider les astronautes à réparer l’extérieur de leur vaisseau spatial sans quitter physiquement le navire. Les astronautes pourraient, à distance, utiliser la main de l’intérieur du vaisseau spatial pour rester en sécurité tout en apportant des améliorations importantes à leur vaisseau.
Nous n’avons pas de date précise sur la fin de ce projet de grande envergure. Quoi qu’il en soit, l’univers des prothèses évolue grâce à la robotique et cette main robot pourrait bien être la main bionique aux mouvements les plus réalistes et proches d’une main humaine !
Par Alexandra Collet, le
Étiquettes: main, robotique-2, emanuel-todorov, tendons, zhe-xu
Catégories: Technologie, Sciences, Actualités