

























Les chercheurs ont mis au point le tout premier robot aux composants souples et déformables, capable de se déplacer tout seul sans l’utilisation de moteur ou de composant mécanique. Le robot « marche » quand un courant électrique est appliqué aux fils en alliage à mémoire de forme intégrés dans son cadre. Une avancée qui vient d’être dévoilée par une équipe de la Seoul National University et de la Sungkyunkwan University et qui ouvre le champ à de nombreuses possibilités et applications.
UN ROBOT « MOU »
La robotique molle est un sous-domaine de la robotique qui s’intéresse aux robots construits en matériaux et/ou structures souples, élastiques, déformables, etc. L’utilisation de ces matériaux particuliers offre de nombreux avantages comparé aux robots classiques. Comme le souligne Sung-Hoon Ahn, un des co-auteurs de ces recherches, « Le principal avantage de ce robot modulable est la robustesse dans différents environnements due à l’absence de systèmes mécaniques tels des moteurs ou des engrenages ».
En effet, les systèmes mécaniques peuvent subir de nombreux problèmes (pannes, obturations, manque de lubrification, etc.) auxquels il n’est pas toujours possible de répondre si l’appareil se retrouve par exemple sous l’océan ou dans l’espace. Les robots mous constituent donc une solution idéale pour les explorations spatiales et le faible coût de leurs matériaux les rend d’autant plus intéressants à utiliser.

DES MODULES CONNECTÉS ENTRE EUX
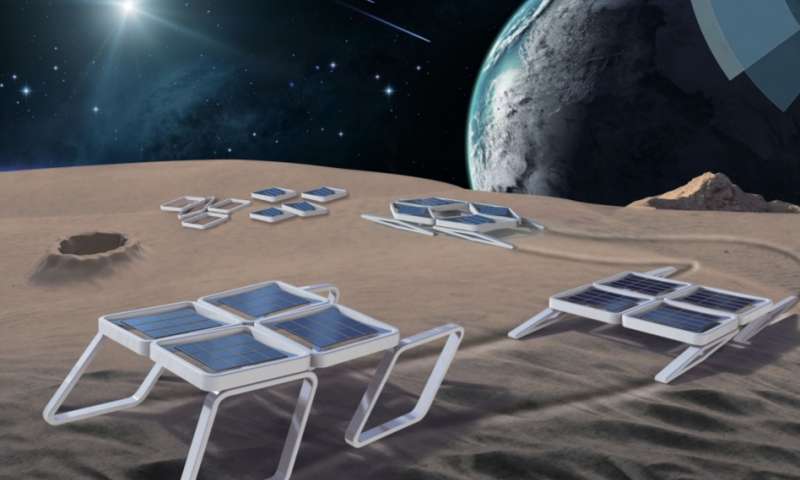
Le robot nommé DeloyBot se veut donc une réponse aux difficultés qui peuvent être rencontrées par des robots « classiques » sur des environnements difficiles. DeployBot est composé de huit modules, quatre pour le corps et un pour chaque jambe. Ces modules faits à la fois de matériaux rigides et flexibles contiennent des aimants qui les connectent et les lient entre eux.
Un fil en alliage à mémoire de forme traversant le cadre de chaque module est responsable du déploiement et du pliage des modules. Une fois stimulé, ce film permet donc aux modules connectés de se plier et de se déplacer.
2 FAÇONS DE « MARCHER »
Pour cela, les chercheurs ont démontré que DeployBot pouvait se mouvoir de deux façons différentes. Dans le premier cas, le robot avance à la manière d’un ver de terre en rampant sur le sol. Un courant est envoyé à travers le corps du robot et provoque un déséquilibre entre l’avant et l’arrière du robot au niveau du contact frictionnel avec le sol. Par conséquence, le robot remonte ses jambes arrières alors que ses jambes avant restent en place, ce qui provoque un mouvement vers l’avant.
Deploybot peut aussi avancer à la manière d’un animal à quatre pattes. Mais cette technique suppose que le robot supporte tout le poids de son corps sur seulement deux jambes, ce qui n’est pas encore réalisable – enfin sur terre. En effet, utilisant le principe d’Archimède, les scientifiques ont placé le robot sous l’eau et ont réussi à le faire avancer de cette manière sur la surface sableuse d’un aquarium.

UNE DÉCOUVERTE QUI OUVRE LA VOIE À D’AUTRES POSSIBILITÉS
Actuellement ce robot ne se déplace assez lentement, seulement 2 mètres par seconde mais il ouvre la voie à de nombreuses applications où la vitesse n’est pas importante. Pour les chercheurs, leur technique peut être adaptée à des modules de différentes tailles et donc à différentes fonctions. Ils y voient notamment des possibilités pour fabriquer des structures micros ou nanoscopiques.
Ils soulignent aussi que d’autres méthodes pour bouger un robot sans courant électrique pourraient être développées comme par exemple l’utilisation d’actionnements pneumatiques, de champs magnétiques ou de forces optiques. Deploybot pourrait donc bien être la première étape vers une tout nouvelle génération de robots.
















